Cutting-edge technologies in the service of underwater archaeology
Who would believe that the dwindling fish population poses a threat to the roughly three million shipwrecks scattered across the world’s ocean floors?
Vincent Creuze, University of Montpellier

Yet it is industrial trawl fishing—often conducted at depths of over 1,000 meters and now partially restricted to 800 meters in Europe—that poses one of the greatest threats to the underwater heritage of the deep sea. In a matter of seconds, a site dating back thousands of years can be disrupted or even destroyed, even though it has been remarkably well-preserved until now, particularly due to the darkness and low temperatures, far from violent tidal currents or surface weather phenomena.
The remarkable state of preservation of deep-sea wrecks makes them of great archaeological interest, but unfortunately also attracts the attention of a few private “treasure hunting” companies, which recover the cargoes to resell them, with no regard for archaeological research and often in violation of the 2001 UNESCO Convention on the Protection of the Underwater Cultural Heritage.
Preserving underwater heritage
In the face of these threats, governments must urgently locate and assess their submerged cultural heritage in order to preserve its invaluable scientific and cultural value. In recent years, underwater archaeology teams from many countries have thus begun to explore the depths of the ocean.
France, the world’s second-largest maritime nation, holds a unique position in this field. As early as 1966, André Malraux, then Minister of Culture, established DRASSM, the Department of Underwater and Submarine Archaeological Research. For more than 50 years, French underwater archaeologists have honed their expertise and know-how, which are now recognized worldwide. Until recently, most archaeological campaigns were limited to human diving, with a few occasional forays to greater depths on the sidelines of oceanographic (Ifremer) or industrial (Comex, notably) operations.

DRASSM, 2019
Since the 2010s, given the urgency of protecting deep-sea heritage, underwater archaeologist Michel L’Hour, Director of DRASSM, has launched an ambitious program to develop innovative tools dedicated to deep-sea archaeology. The first phase involved designing a vessel suitable not only for human-led archaeological excavations at depths between 5 and 50 meters, but also for deploying robots to survey shipwrecks at depths of over 1,000 meters. This 36-meter vessel was launched in 2012 and is aptly namedthe André Malraux.
Wreck detection
Since electromagnetic waves barely penetrate the sea, most technologies for detecting shipwrecks rely on the use of acoustic waves. This is the case, for example, withsidescan sonar, an acoustic antenna towed a few meters above the seafloor. It allows for mapping the seafloor and detecting anomalies in the terrain. When mapping depths greater than 300 or 400 meters, the sidescan sonar is mounted on an autonomous underwater vehicle (AUV). The sidescan sonar is often paired with a magnetometer, which detects magnetic anomalies potentially caused by the metal components of a shipwreck.
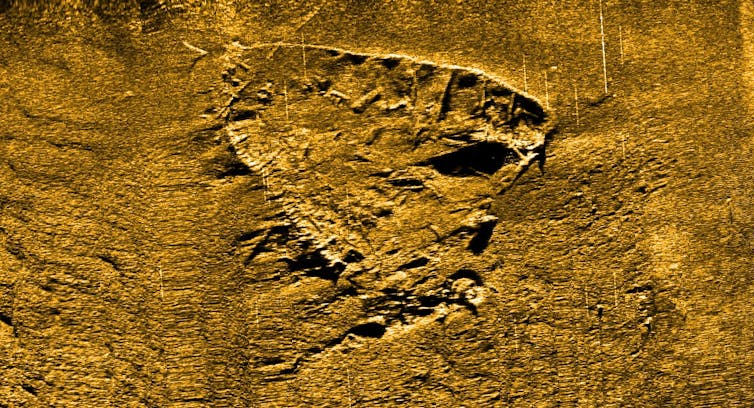
DRASSM
These operations, known as “surveys,” are conducted either as part of preventive archaeological surveys (for example, prior to the laying of a submarine cable) or as part of searches for specific shipwrecks. Thus, the wrecks of the Cordelière and the Regent, which have lain off the mouth of the Brest Channel since 1512, are currently the subject of an extensive search campaign. For this type of clearly identified wreck, survey areas are narrowed down through a meticulous study of archives (eyewitness accounts or survivor testimonies, meteorological records, studies of ocean currents, morphogeology, old nautical charts, period newspapers, etc.), as well as through the analysis of oceanographic data, such as currents, tides, or prevailing winds.
The assessment phase
The survey is followed by an inspection, which allows for a visual determination of whether magnetic or acoustic anomalies correspond to shipwrecks. Beyond the limits of human diving, this inspection is most often carried out by aremotely operated vehicle (ROV). Using its umbilical cable—the cable connecting it to the surface—the ROV transmits live video to the operator aboard the ship stationed above the wreck.
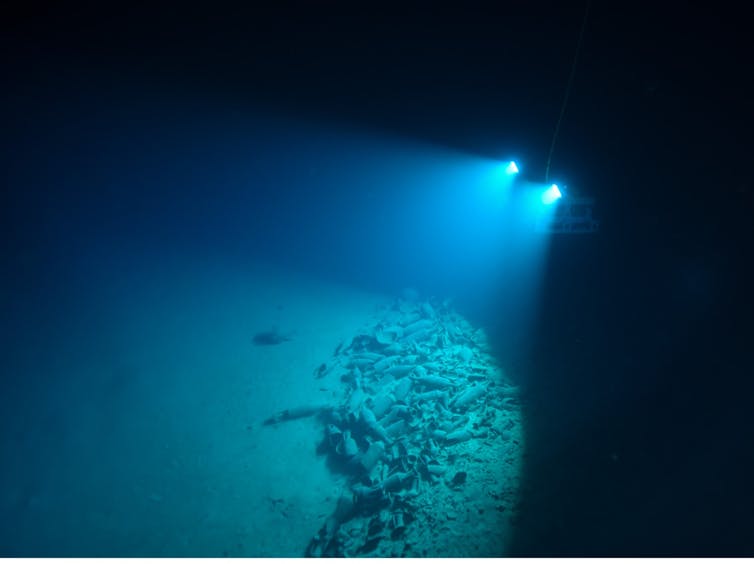
F. Osada/DRASSM
If the site is of interest, hundreds or even thousands of photos are taken to construct a 3D model of the wreck after the fact. This technique, known as photogrammetry, is now fully mastered. It is used both with a single SLR camera (Ifremer, ipso facto) and by combining multiple digital cameras (Comex). The models are then used for scientific research or made available to the general public for virtual reality tours, as DRASSM did for the wreck of the Lune or that of the battleship Danton, which has lain at a depth of 1,025 meters since 1917.
In 2019,Onera (the French National Office for Aerospace Studies and Research), LIRMM (the Montpellier Laboratory of Computer Science, Robotics, and Microelectronics), and DRASSM developed a new single-camera system, about the size of a bottle of mineral water, capable of generating a 3D model in real time while precisely calculating the robot’s position. This technology facilitates navigation and speeds up the analysis of visited sites.
Harvest without breaking
When surveying a shipwreck, it is sometimes necessary to collect samples. Existing ROVs were developed primarily for the oil industry and are unsuitable for archaeological work. The slowness and limited dexterity of their hydraulic manipulator arms force operators to place the robots on the seabed—and thus directly on the wreck itself. Furthermore, the hydraulic grippers on the arms are very often incompatible with the fragility and shape of the most delicate archaeological objects (glass, wood, leather, ropes, fabrics, etc.). For these reasons, since 2012, DRASSM has begun developing specialized robotic tools, with the support of LIRMM.
A laboratory site 91 meters below ground

Louvre: Department of Graphic Arts: inv. 32594
Most of the tests in this program are conducted near Toulon, on the legendary wreck of the Lune, at a depth of 91 meters. This ship of Louis XIV, which sank in 1664, presents most of the challenges encountered on deep-sea wrecks and allows for the testing of new robotic tools after they have been validated in the laboratory.
Thus, in 2014, archaeological samples were collected using a robotic arm designed by Techno Concept (Loupian, Hérault), and later using a claw.
Thanks to a computer-assisted control algorithm developed at LIRMM, the carrier robot achieves horizontal and vertical precision of approximately 1 to 2 cm, making it possible to operate without manipulator arms and to work “on the fly” without touching the bottom. In fact, it is the robot itself that pivots and moves to gently position the claw or gripper onto the object to be retrieved. The absence of arms significantly reduces the size of the robots, allowing them to more easily access cramped or complex areas of shipwrecks.

F. Osada, T. Seguin/DRASSM
Encouraged by these initial findings, the French archaeologists expanded their collaborations. Thus, in 2016, the underwater humanoid Ocean One, developed entirely by Professor Oussama Khatib’s team at Stanford University, made its first dive to the wreck of the Lune, accompanied by DRASSM and LIRMM. The robot features two innovative arms, operated quickly and precisely by electric motors and equipped with force sensors. Force feedback is provided via haptic interfaces—a type of motorized joystick used to control the robot’s translation and rotation—similar to those used to operate surgical robots.
Still in the field of manipulation, this time as part of the ANR SeaHand project,the PPrime Institute completed a robotic hand specifically designed for underwater archaeology in early 2020. By measuring the forces perceived by each finger, the SeaHand paves the way for “tactile” excavation in turbid environments. This was unthinkable just a few years ago.
All these advances address many of the needs of deep archaeology, but there are still many challenges to overcome, such as the delicate removal of large volumes of sediment during a systematic excavation or the automated analysis of the vast amounts of data generated during survey operations.![]()
Vincent Creuze, Associate Professor of Underwater Robotics, University of Montpellier
This article is republished from The Conversation under a Creative Commons license. Readthe original article.